Hi, oh there are many aproaches to your problem, I cant make a concrete example here, but throw in some ideas:
look at the solution starcraft had (also a tilebased map, having to cope with lots of path-calculations on 1997 hardware)
(better check the link directly…, JGO displays it weirdly)
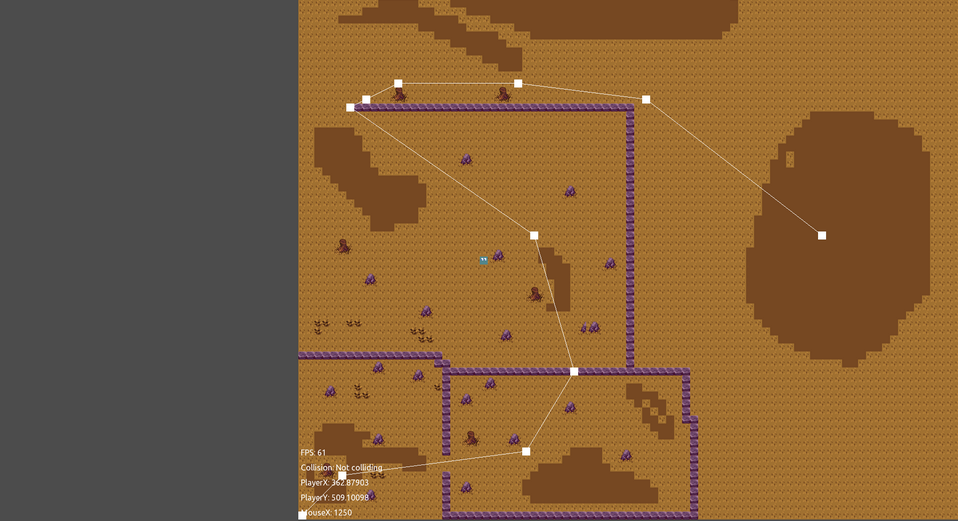
You see that they have separated the map into subregions wich are connected by a graph (the lines).
The units will first do a pathfind over this graph (the lines) to determine the regions to travel.
Once this is done, the units will use the local pathfinding (as you have it) to reach the next “centerpoint” of the next region the was calculated on the path.
So you basically do two pathfinds:
-1, along the graph connecting the regions
-2, locally for the region the actor is currently in, until entering a new region
so how to create those regions?:
-by code (using a floodfill algorythm that tries to MARK about the same amount of tiles for each region, the startingpoint are probably spawned accoring to a grid-pattern)
-by hand (tedious, but basically that means to make equally sized area-blobs, and assign each one another ID number; in your editor you could do that with another layer)
-then create that path-graph between those regions. Wich basically just means that any region touching another regions via at least one passable tile will have a connection between them (between its centerpoint, and the others centerpoint)
You can also use A* to search that graph, just google tutorials on A* that use non tile-based connection-graphs.
That would be the approach I try first if you want to use one huge continuous tile-map
Easier would be to have regions only connected by specific passages (North, South,East,West), and have those regions in the world aligned in a grid.
Then you can use your A* two times. Once between regions, and the second time within a regions.
(You have to be careful to assure that each passage can walk to the other 3 passages)
Tip: if you want to make a multiuser game: let the client calculate the path., then send that path to the server.
The server just checks if it does not violate any of your constrictions.